一.前言
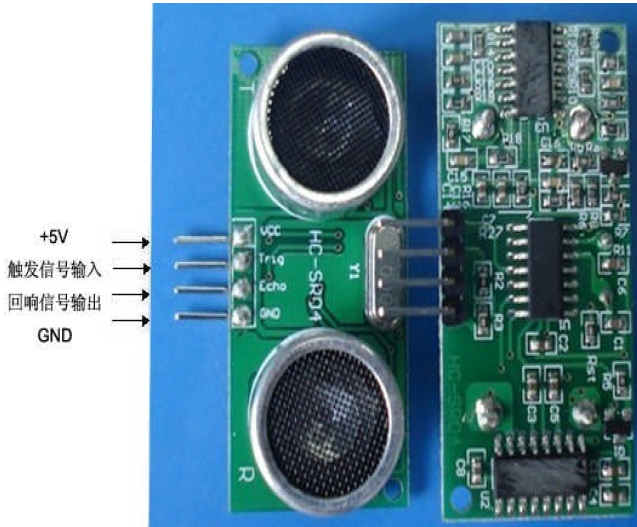
HC-SR04超声波测距模块可提供2cm-400cm的非接触式距离感测功能,测距精度可达高到3mm;模块包括超声波发射器、接收器与控制电路。像智能小车的测距以及转向,或是一些项目中,常常会用到。智能小车测距可以及时发现前方的障碍物,使智能小车可以及时转向,避开障碍物,所以,我们今天就来学习一下这个传感器。
二.工作原理
1.给超声波模块接入电源和地。
2.给脉冲触发引脚(trig)输入一个长为20us的高电平方波3.输入方波后,模块会自动发射8个40KHz的声波,与此同时回波引脚(echo)端的电平会由0变为1;(此时应该启动定时器计时)
4.当超声波返回被模块接收到时,回波引 脚端的电平会由1变为0;(此时应该停止定时器计数),定时器记下的这个时间即为超声波由发射到返回的总时长。 5.根据声音在空气中的速度为344米/秒,即可计算出所测的距离。要学习和应用传感器,学会看懂传感器的时序图是很关键的,所以我们来看一下HC-SR04的时序触发图。
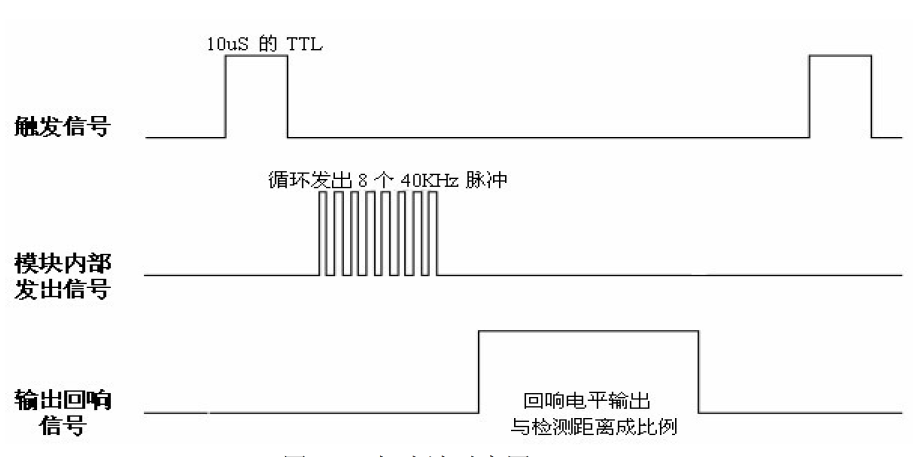
我们来分析一下这个时序图,先由触发信号启动HC-RS04测距模块,也就是说,主机要先发送至少10us的高电平,触发HC-RS04,模块内部发出信号是传感器自动回应的,我们不用去管它。输出回响信号是我们需要关注的。信号输出的高电平就是超声波发出到重新返回接收所用的时间。用定时器,可以把这段时间记录下来,算出距离,别忘了结果要除于2,因为总时间是发送和接收的时间总和。
三.程序
#include<reg52.h>
#define uchar unsigned char
#define uint unsigned int
sbit Echo=P3^2;
sbit Trig=P1^5;
bit flag=0;
/*********************************** 函数:void Delay5us() ---------------------- 说明:5微秒延时函数 参数:无 返回值:无 ***********************************/
void Delay5us()
{ uchar i; i--; i--; i--; i--; i--; i--; }
void DelayMs(uint ms)
{ uint x,y; for(x=ms;x>0;x--)
for(y=110;y>0;y--); }
void Init()
{
TMOD=0x21;
SCON = 0x50;
EA=1;
ES=1;
ET0=1;
ET1=1;
TH1=0Xfd;
TL1=0xfd;
TR1=1;
}
void Send(uint dat)
{
SBUF=(dat/100)+ 48; // 发送 百 位
while(!TI);
TI=0;
SBUF=(dat%100/10)+48; // 发送 十 位
while(!TI); TI=0;
SBUF=(dat%10)+48; // 发送 个 位
while(!TI); TI=0;
}
uint Conut(void)
{
uint time; // 用于记录测得的时间
uint ss; // 用于记录测得的距离
time = (TH0*256+TL0)*1.09; // 总时间
TH0=0; TL0=0;
if(flag==1) // 如果超出测量距离,则不传输数据
{ flag=0; ss=0; }
else
{
ss=time*1.7/100; // 空气中声音的速度是340m/s
}
return ss; }
void main(void) {
uint ss; Init();
while(1)
{
Trig=1;
Delay5us();
Delay5us();
Trig=0;
while(!Echo);
TR0=1;
while(Echo);
TR0=0;
ss=Conut(); // 计算
Send(ss); // 将计算的值通过串口发送出去
DelayMs(800);
}
四.总结
上面这个程序的功能就是从测距传感器获得距离的数值,进行单位的转化后用串口进行输出,显示在串口助手中,转化后的单位为厘米,还有一点需要注意的是,触发输入和回响输出端在不同的板子上是不一样的,大家要根据自己的原理图及单片机自己修改,有什么问题可以互相交流0.0
}
void zd0() interrupt 1 { flag=1; }